惯性导航系统(INS)是一种不依赖于任何外部信息、也不向外部辐射能量的自主式导航系统。具有很好的隐蔽性,其工作环境不仅包括空中、地球表面,还可以在水下。惯性导航的基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标系中,就能够得到在导航坐标系中的速度、偏航角和位置信息等。
旋极公司和航空某研究所通力合作,为国内某航空通用性惯性导航系统提供源代码的实时多任务操作系统方案和技术支持,用户通过专家评审和实际实验,证明该源代码操作系统Nucleus+ 具有安全(源码公开)、微内核、高实时等特点,目前该新导航系统具有重量轻、精度高,具有快速反应能力,并可与GPS构成组合导航系统,可明显提高我国主战飞机性能,有效地提高武器投放和攻击的精度。

- BDS实时监测在陆军监测中的应用
0评论2017-11-04
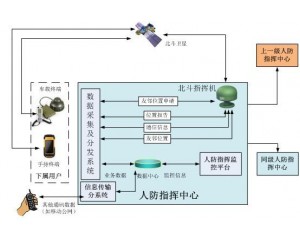
- 基于北斗系统的人防指挥应急通信系统
0评论2017-10-31
使用LabVIEW、PXI、DAQ和DIAdem搭建声纳导流罩监测系统
基于LabVIEW和NI PXI数据采集(DAQ)硬件开发一个声纳导流罩监测系统(SDMS),来采集处理所有的相关板载数据,并基于NI DIAdem搭建一个后处理系统。
0评论2012-12-17
在无人机制导、导航与控制中应用半实物仿真
在开发的早期阶段,开发一个硬件在环(HIL)测试环境来测试无人机GNC解决方案。 HIL测试环境是软件仿真和飞机实验的一个中间步骤,对于无人机GNC软件的开发过程非常关键。通过HIL环境,工程师可以在一个可控的仿真环境中对无人机软件进行测试。同时,它也能加速设计,缩短开发周期。
0评论2012-12-17
一个典型的 VPX 雷达信号处理方案
系统选择 VPX 总线, 搭建了一个基于 MPC8640D/8641D 处理器的高性能处理系统。处理器之间使用 sRapidIO 或 PCIe 等高速串行总线互联, 板卡之间使用sRapdIO 高速互联。
0评论2012-05-03
雷达接收机多通道高速数据采集系统
在现代雷达信号处理中,试验数据的获取有着重要意义。实测数据是检验算法有效性的重要依据,也是算法修正的依据。不同型号的雷达接收机,其雷达回波信号特性和工作模式各不相同,这就对信号的数据采集提出了更高的要求,即要求实现高速、高精度的数据采集以及复杂、灵活多变的触发工作模式。
0评论2012-03-14